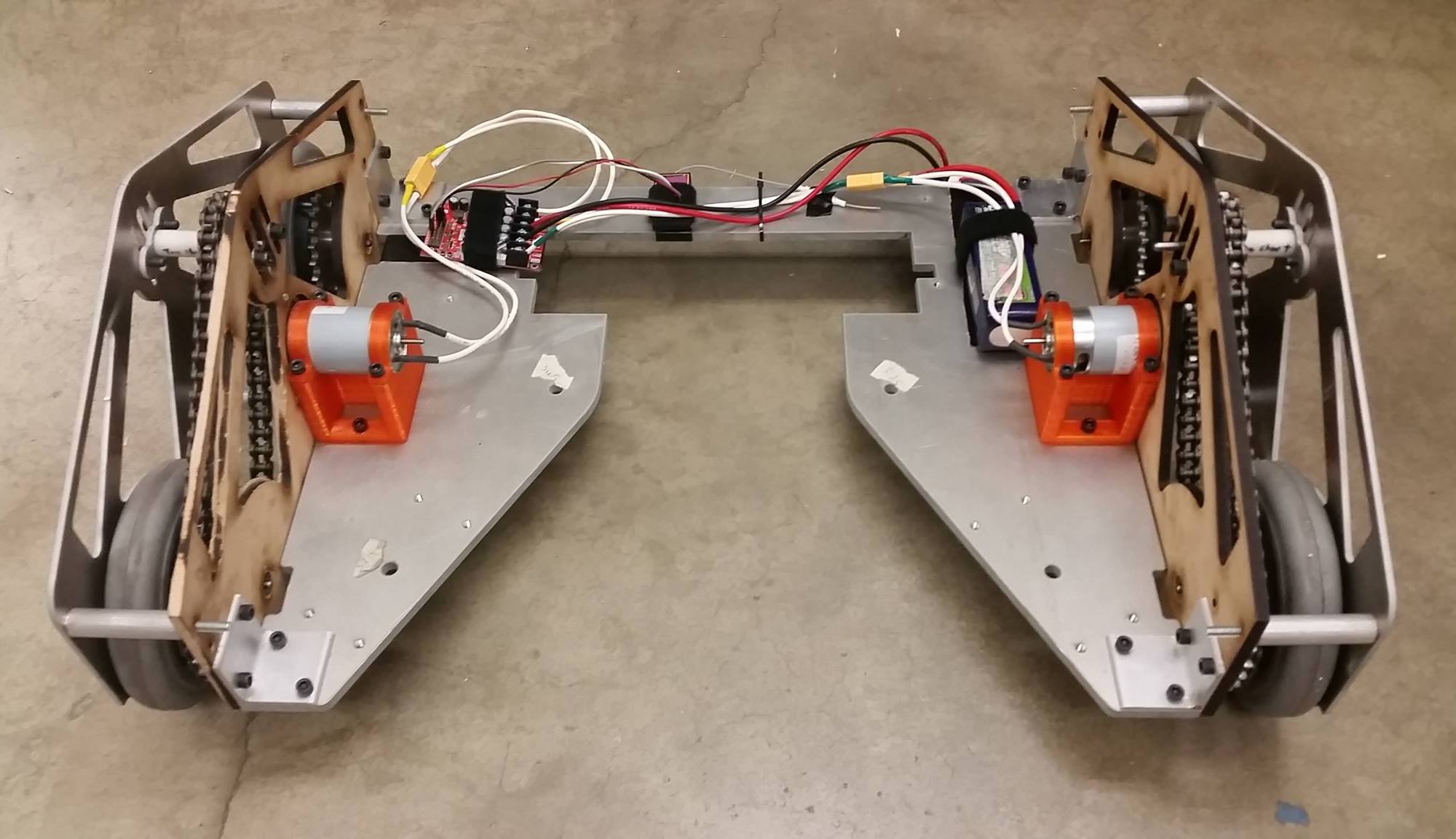
This project was conducted for Caltech’s course Design for Independence from Disability. My team designed and fabricated a prototype mechanism for converting a standard mechanical wheelchair into one operable by a person with hemiplegia. Hemiplegia, in which one half of the body is full or partially paralyzed, is common in stroke victims. While wheelchairs capable of one-arm operation exist, there are limited models and all are high cost. This device allows the user to select a (much less expensive) standard wheelchair of their preference, and convert it to a single-arm operable wheelchair -without permanent modification. Our designed device is able to bolt onto a wheelchair with no need for technical fabrication – only a hex wrench is required for installation.
One-Arm Wheelchair