The DARPA NOM4D project aims to enable the construction of large-scale structures on-orbit without the constraint of launch vehicle volume. As a member of the JPL team, I worked with Opterus to develop robotics technology to enable the automated assembly of trusses from deployable booms. I designed, fabricated, and operated a testbed for exploring the manipulation of bistable materials (for example, a tape measure) in order to better develop a concept of operations for robotic manipulation of deployables.
Mars Helicopter Gravity Offload System
Planning for the NASA-European Space Agency Mars Sample Return campaign includes an option for Sample Recovery Helicopters (SRH), which would collect sample tubes and bring them to the Sample Retrieval Lander if NASA’s Perseverance rover would be unable to do so. As a member of the helicopter team, I was responsible for developing the Gravity Offload System (GOS), which would be used to simulate Martian gravity while testing the helicopter’s flight in a vacuum chamber.
I resurrected the GOS hardware developed for the Ingenuity helicopter, which had been in storage for five years, was missing components, and had no documentation. I then developed hardware and software for a system performance characterization testbed, which I used to evaluate the GOS developed for the Ingenuity helicopter. With the data I collected, I diagnosed performance anomalies in the inherited hardware and identified architectural changes to improve performance.


Gripper Attachment

This was a very, very small project, but a great example of how good design can save a lot of time and money. While at JPL, we had a robot arm which was designed to manipulate large, heavy structures that we wanted to use for fine manipulations of thin tubes. The team was planning to design and fabricate a new gripper for the arm, a month-long process for multiple engineers which would ultimately cost the project upwards of $60k. I realized we could get the same performance by modifying the existing gripper, and with just a few hours I designed, 3D printed, and installed removable snap-fit gripper fingers that allowed us to switch between manipulation of large and small structures.
MiniRHex V2

MiniRHex is an open-source, low-cost hexapod developed by the Robomechanics Lab. I updated the mechanical and electrical design from the first version to be higher performance, more robust, and far easier to assemble, with a greatly simplified parts list. You can learn more about MiniRHex and build your own here!
Nonprehensile Terrain Manipulation

My primary PhD research is on using models of wheel-soil manipulation to develop strategies for planetary rovers to alter soft-soil terrain. Nonprehensile terrain manipulation has the capability to enhance sampling, augment mobility, and much more. In 2018 I earned a NASA Space Technology Research Fellowship to pursue this research. I collaborate frequently with engineers at NASA Ames Research Center, and in fall 2019 accompanied a group of NASA scientists to Chile’s Atacama Desert to perform terrain manipulation experiments there.
Publications related to this project:
C. Pavlov and A. M. Johnson, “Soil Displacement Terramechanics for Wheel-Based Trenching with a Planetary Rover,” 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 4760-4766. Link.
Youtube video demonstrating nonprehensile terrain manipulation on Ames’ KREX-2 rover.
Press related to this project:
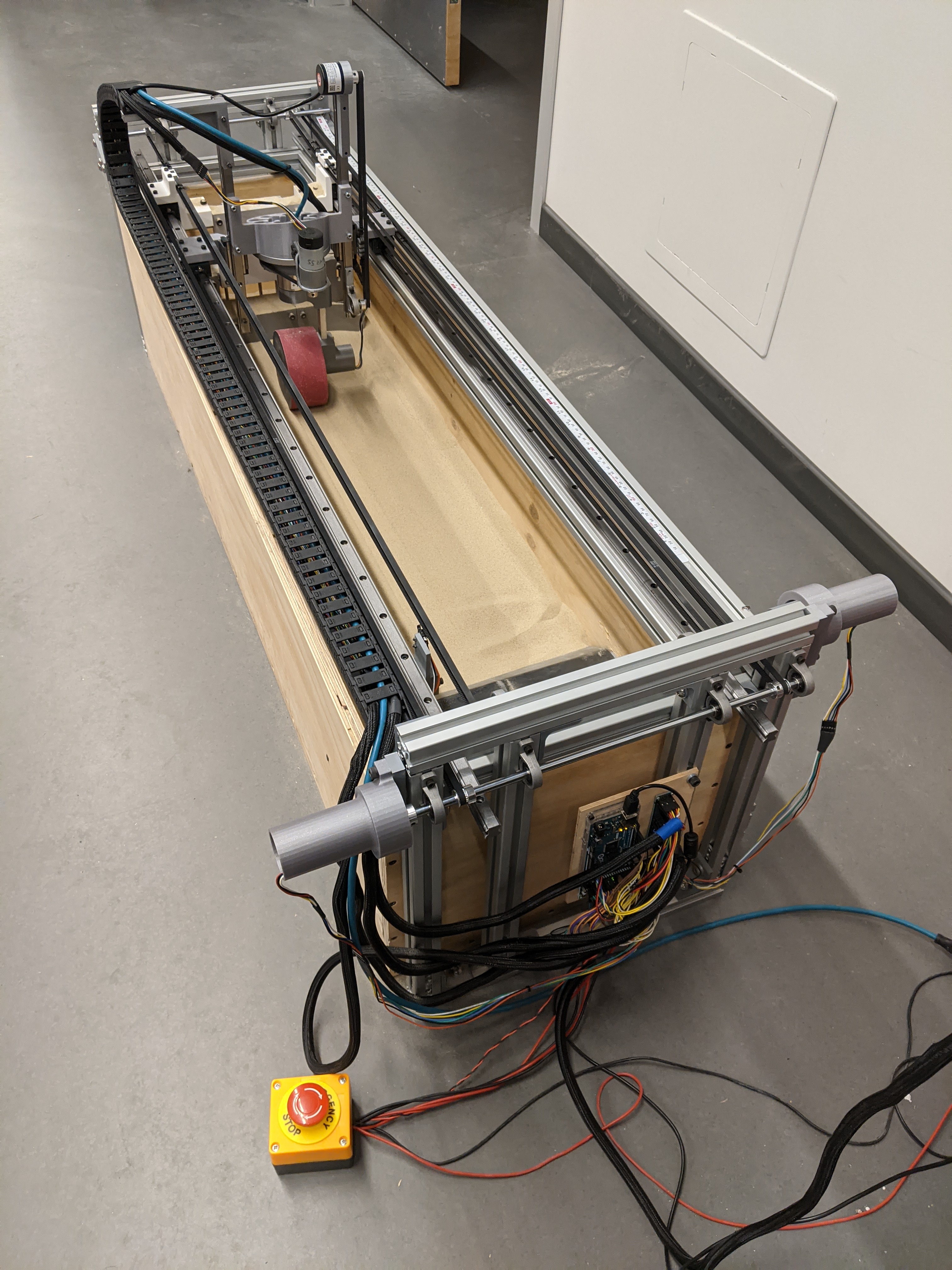
Terramechanics Testbed

In 2020 I constructed a testbed in my apartment for measuring wheel-soil interaction forces. This testbed is modeled on one developed at NASA Ames, and is fabricated nearly entirely with rapid prototyping methods and precut material. The testbed has a 6-axis force-torque sensor, four motors for controlling a soil preparation mechanism and wheel travel speed, rotational speed, and angle, and wheel depth measurement. It contains 4kg of PLA worth of custom brackets and mounts and about 250 lbs of sand.
I use this testbed in my work modeling wheel-soil interaction forces for Nonprehensile Terrain Manipulation.


Machinable Manometer for Ventilator
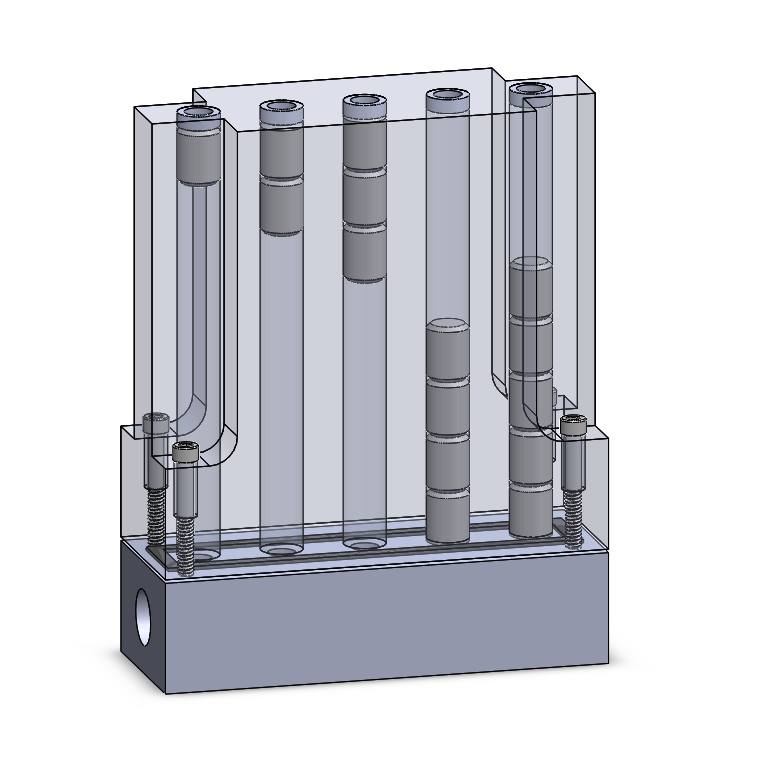
In April 2020 I contributed to efforts to rapidly scale ventilator manufacturing by making a fully machinable ventilator based on the Go2Vent. Fortunately, these were never needed, but I got the chance to design a neat manometer that is easily fabricated with manual machining and does not require calibration.
The device measures lung pressure by using a main air intake channel to pressurize an array of vertical channels, each of which has one to five steel dowel pins. The channels are open at the top so that air pressure from below can raise each stack of pins until they contact the top, sealing off airflow in that column. The manometer is read by viewing which pins are at the top, with each channel representing an increment in pressure.
Wall-Climbing Hexapod (TRHex)

Inspired by my previous work on Volcanobot, myself and several friends developed a microspine-enhanced hexapod robot based on the RHex architecture. While not yet able to climb vertical walls, the robot can scale inclines up to 55 degrees and statically cling to overhangs far beyond vertical. I contributed the overall leg architecture as well as a novel way of rapidly fabricating embedded microspine structures through the use of FDM 3d printing.

Publications related to this project:
Our Youtube video created as a part of the course
Matt Martone, Catherine Pavlov, Adam Zeloof, Vivaan Bahl, Aaron M. Johnson. Enhancing the Vertical Mobility of a Robot Hexapod Using Microspines. arXiv preprint, last revised September 2019. Link.
Paul Nadan, Dinesh K. Patel, Catherine Pavlov, Spencer Backus, and Aaron M. Johnson. Microspine Design for Additive Manufacturing. IEEE/RSJ International Conference on Intelligent Robots and Systems 2022. Link.
Press related to this project:
Design of Rover Rocker for Push-Roll Locomotion
In summer 2016, I worked under Professor David Wettergreen of CMU’s field robotics center to design a rover rocker capable of push-roll locomotion. Push-roll locomotion is a novel mobility concept in which a rover is able to expand and contract each rocker such that the front and rear wheels can be moved relative to another (resembling the motion of an inchworm, but performed with wheels). I designed a mechanism for testing the efficacy of push-roll locomotion by analyzing the platform’s drawbar pull. I also developed an experimental plan for testing the mechanism in the FRC’s soft soil testbed.
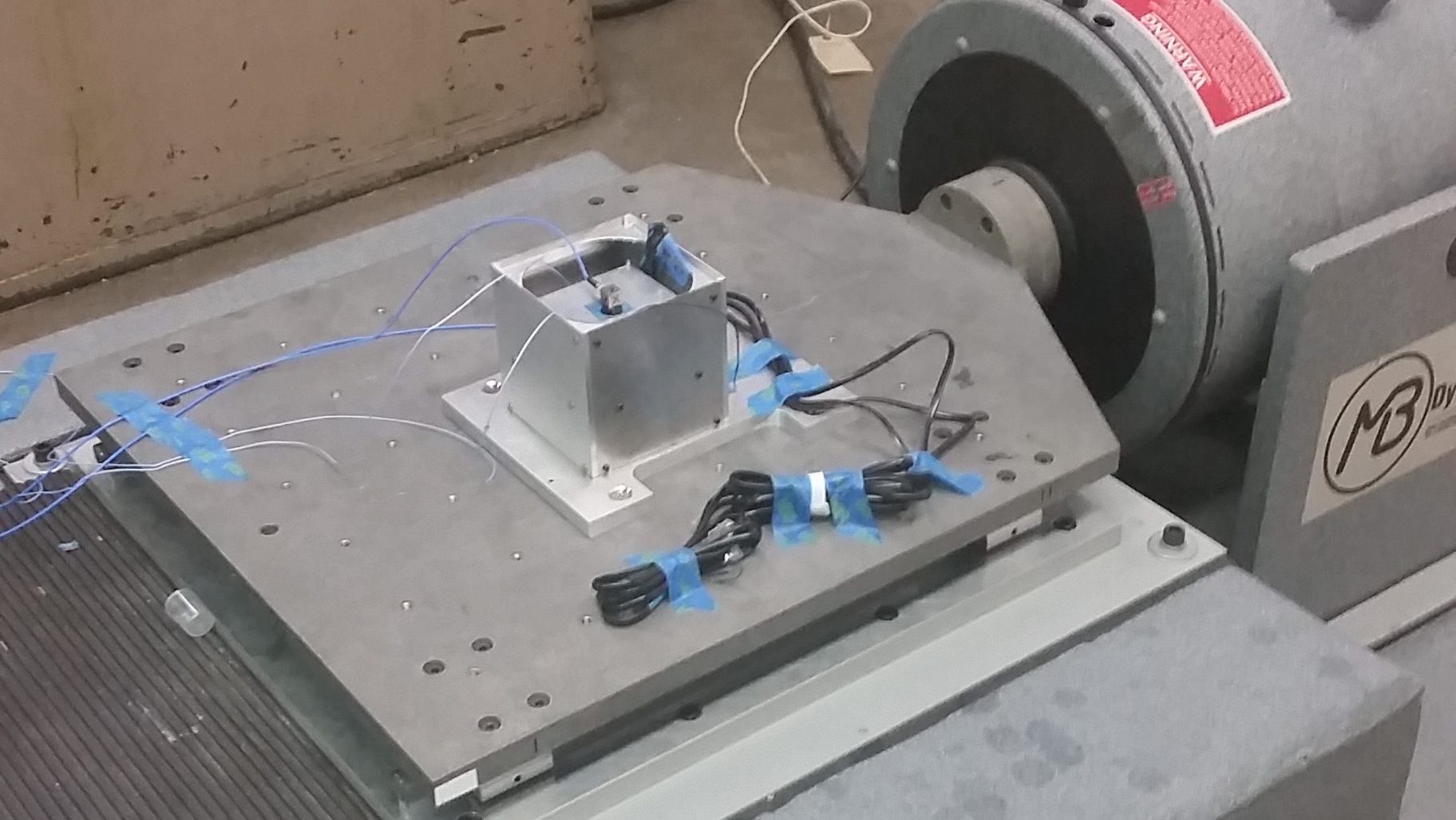
Cube Sat-Based Reconfigurable Telescope
In 2015-2016 I had the opportunity to work on JPL’s AAReST project through Caltech’s Aerospace Engineering course. I served on the team working on the boxes housing the telescope’s mirrors. We developed assembly procedures for the box, assembled a prototype, and performed vibrational testing to simulate response during a launch.